Hyeonbeen (Edward) LeeI am an incoming PhD student at Virginia Tech, where I'll work with Prof. Simon Stepputtis in the TEA Lab. I am interested in physics-aware machine learning and neurosymbolic AI for contact-rich robotics. Before joining Virginia Tech, I received my B.Eng. and M.Eng. degrees in Mechanical Engineering at Kyung Hee University, where I worked with Prof. Jin-Gyun Kim in the Modeling & Simulation Lab. In 2023, I was fortunate to work with Prof. Joseph Lim in the CLVR Lab at KAIST AI. I usually go by Edward, but you can also call me Hyeonbeen, which is my given name in South Korea. edwardlee [at] vt.edu / CV / Scholar / LinkedIn / GitHub |

|
ResearchI'm interested in grounding AI models in physics to enable efficient, interpretable and generalizable control of robot-environment interactions. In Kyung Hee University, I used to work on physics-aware machine learning for modeling nonlinear dynamics of contact- and vibration-rich physical systems. |
|
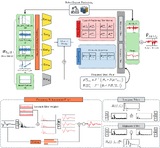
Frequency-aware Decomposition Learning for Sensorless Wrench Forecasting on a Vibration-rich Hydraulic ManipulatorHyeonbeen Lee, Min-Jae Jung, Tae-Kyung Yeu, Jong-Boo Han, Daegil Park, Jin-Gyun Kim Submitted, 2026 [code] Combines decomposition-based probabilistic modeling, frequency-awareness, and proprioception-to-wrench transfer learning to forecast contact- and vibration-rich wrench signals in the short-term future without a physical F/T sensor. |
|
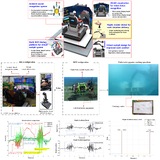
Buoyancy-integrated Hybrid Reaction Force Estimation Method with Real-time Haptic Feedback for Underwater Hydraulic ManipulationBonhak Koo, Min-Jae Jung, Hyeonbeen Lee, Tae-Kyung Yeu, Jin-Gyun Kim, Jong-Boo Han, Yeongjun Lee, Daegil Park Submitted, 2026 |

|
cNN-DP: Composite Neural Network with Differential Propagation for Impulsive Nonlinear DynamicsHyeonbeen Lee, Seongji Han, Hee-Sun Choi, Jin-Gyun Kim Journal of Computational Physics (WoS IF Top 2.5% in Physics, Mathematical), 2024 [code] Sequentially predicts lower- to higher-order dynamic responses from time and time-invariant system parameters through physics-aware differential propagation, enabling accurate data-driven modeling of impulsive dynamic responses. |

|
Multi-body Dynamics Model for Spent Nuclear Fuel Transportation System under Normal Transport Test ConditionsSeongji Han*, Gil-Eon Jeong*, Hyeonbeen Lee, Jin-Gyun Kim (* Co-first authors) Nuclear Engineering and Technology (WoS IF Top 13.7% in Nuclear Science & Technology), 2023 Simulates the dynamic response of a spent nuclear fuel transportation system (KORAD-21) under normal road and sea transport conditions using a multi-body dynamics model calibrated and validated against real-world transport data. |
|
Design and source code from Jon Barron's website |